Task-general modelling framework for intermittent sensorimotor control
Link: https://doi.org/10.17605/OSF.IO/DF9PW
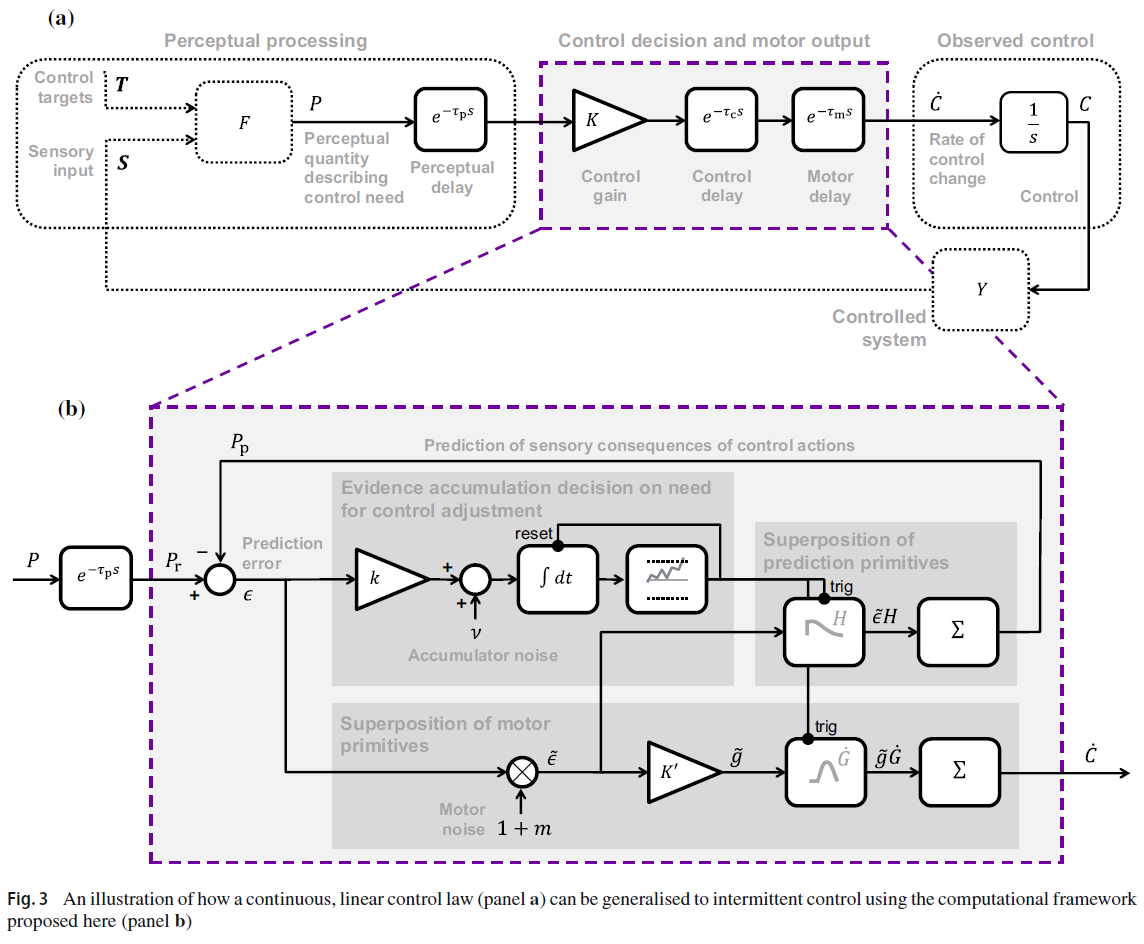
MATLAB implementation of the modelling framework proposed in (Markkula et al., 2018). See DoControlModelTimeStep.m, used in do_fig4_MinimalExample.m and do__G_SimulateLaneKeepingModel.m (via RunLaneKeepingSimulation.m).
Markkula, G., Boer, E., Romano, R., & Merat, N. (2018). Sustained sensorimotor control as intermittent decisions about prediction errors: Computational framework and application to ground vehicle steering. Biological Cybernetics, 112(3), 181–207. https://doi.org/10.1007/s00422-017-0743-9
2018 Dec