A looming accumulation intermittent control braking model
Link: https://github.com/gmarkkula/HFES2014ModelsAndFigs
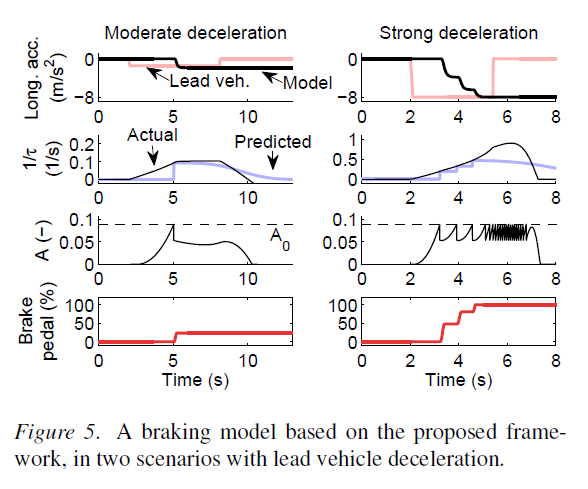
A MATLAB implementation of the looming accumulation intermittent braking control model described in (Markkula, 2014). This implementation is very similar to what has later been presented in more complete detail in (Svärd et al., 2017; Svärd et al., 2021) and as a more task-general model of sustained intermittent control in (Markkula et al., 2018; code linked here).
Markkula, G. (2014). Modeling driver control behavior in both routine and near-accident driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 58(1), 879–883. https://doi.org/10.1177/1541931214581185
Markkula, G., Boer, E., Romano, R., & Merat, N. (2018). Sustained sensorimotor control as intermittent decisions about prediction errors: Computational framework and application to ground vehicle steering. Biological Cybernetics, 112(3), 181–207. https://doi.org/10.1007/s00422-017-0743-9
Svärd, M., Markkula, G., Engström, J., Granum, F., & Bärgman, J. (2017). A quantitative driver model of pre-crash brake onset and control. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 61, 339–343. https://doi.org/10.1177/1541931213601565
Svärd, M., Markkula, G., Bärgman, J., & Victor, T. (2021). Computational modeling of driver pre-crash brake response, with and without off-road glances: Parameterization using real-world crashes and near-crashes. Accident Analysis & Prevention, 163, 106433. https://doi.org/10.1016/j.aap.2021.106433